
| Ԕ����Ϣ |
�C����ͨ�^��ֽ��|���w���F�`�ɲ��� |
| ���� ��Դ��CAAI�J֪ϵ�y�c��Ϣ̎�팣ί�� �r�g��2023/10/16 |
���ͨ�����Lȫ���ٿv�����C���˅s���y���δ���΄ա����C���ˁ��f�����ӿ��ܽ��|�����\����ָ���ֱۺ��|�����κ�һ�c��ÿһ��λ�ã���������һ�����|�¼����C������Ҫ�����M�����������ڝ��ڵĽ��|�¼����ԃ|Ӌ���@��΄յ�Ҏ�������ܿ��׃���y����ɡ� �F�ڣ���ʡ�����WԺ���о��ˆT�ҵ���һ�N�����@һ�^�̵ķ������@�N�������Q�� "�����|�ٿvҎ��"������ʹ����һ�N�Q��ƽ�����˹����ܼ��g���@�N���g�܌��S����|�¼��w�{�锵���^�ٵěQ�ߣ��Ķ�ʹ��ʹ�Ǻ��ε��㷨Ҳ�ܞ�C���˿��ٴ_����Ч�IJٿvӋ���� �mȻ�@�N������̎�������A�Σ������п���ʹ���Sʹ���^С���ƄәC���ˣ��@Щ�C���˿����������ֱۻ����w���ٿv���w��������ֻ����ָ��ץȡ�Ĵ��͙Cе�ۡ��@���������ڜp���ܺģ����ͳɱ������⣬�@�N���g߀�����ڈ��л��ǻ�����̫�ϵ���w̽���΄յęC���ˣ��������ֻ��ʹ�ÙC�dӋ��C���ܿ����m���h����
"늚���cӋ��C�ƌW��EECS�����I�о��� H.J. Terry Suh ���@헼��g���PՓ�ĵĹ�ͬDһ���ߣ����f��"����҂��܉�����ģ�́������@C����ϵ�y�ĽY������ô���ЙC���ӿ������@Щ�Q�ߺ��ƶ����|�S����Ӌ���������^�̣������ǰ�������һ���ں���ϵ�y�� �c Suh һ�����cՓ������߀�й�ͬDһ���ߡ���ʿ�D�����˹������о����ęC���ˌ��� Tao Pang ��ʿ��23�q������ӹ����c��ӿƌW�о�����贝����Լ��Y������ Russ Tedrake��������ӹ����c��ӿƌWϵ�����պ���ϵ�͙Cе����ϵ���S����ڣ�Ҳ��Ӌ��C�ƌW�c�˹����܌���ң�CSAIL���ijɆT���@��о��ɹ����ڱ��ܰl���ڡ�늚����ӹ��̎��W���C���˼��gՓ�ļ�����IEEE Transactions on Robotics���ϡ� ���P�ڙC���˵ď����W�� �����W����һ�N�C���W�����g�����@�N���g�У���������C���ˣ�ͨ�^ԇ�e��W������΄գ����ڽӽ�Ŀ�˕r�@�ê���о��ˆT�f���@�N�W����ʽ���õ��Ǻ��䷽�������ϵ�y��Ҫͨ�^ԇ�e���˽������һ�С� ���ѱ���Ч�ؑ����ڽ��|ʽ�ٿvҎ�������@�NҎ���У��C����ԇ�D�W�����ض���ʽ�Ƅ����w�ļѷ����� ���ǣ����ڙC�����ڛQ�����ʹ����ָ�����ơ��ֱۺ����w�c���w���ӕr����Ҫ����ʮ�|�����ڽ��|�c�M������������@�Nԇ�e������Ҫ����Ӌ�㡣 �������W��������Ҫ���^�����f���ģ�M�r�g���������W�����ԣ���Suh �a����� ��һ���棬����о��ˆT����������ϵ�y���˽��Լ�����ϣ���C������ɵ��΄Ռ��T�OӋһ������������ģ�ͣ���ôԓģ�;͕��������P�@������ĽY�����Ķ�ʹ�����GЧ�� Ȼ�������漰�S���Ľ��|����Ӌ���r�� ���������ķ����������W����ô��Ч����Suh �� Pang ��֪����ʲô��
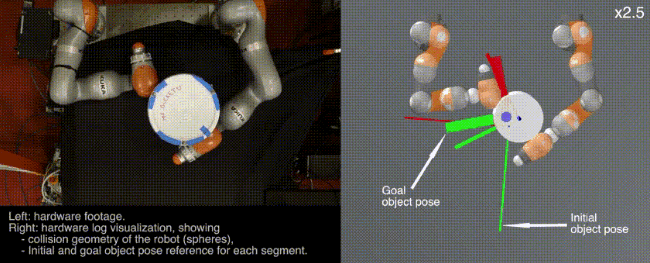
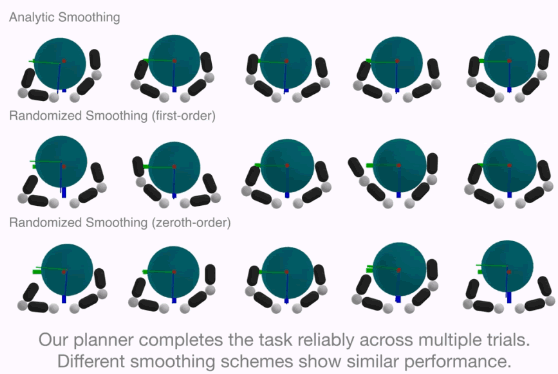
�����M����Ԕ���������l�Fһ�N���Q��ƽ���ļ��g�������W�����F��˳�ɫ�� �C�����ڛQ����βٿv���w�r�������������S���Q�������w�ϲ�����Ҫ�����磬һ����ָ��ÿһ��С�{�����oՓ�Ƿ�������c���w�Ľ��|������̫��Ҫ��ƽ��ƽ���������S���Ҫ�����g�Q�ߣ�������һЩ��Ҫ�ěQ�ߡ� �����W��ͨ�^�Lԇ�������|�c��Ȼ��Ӌ����Y���ļә�ƽ��ֵ���Ķ��[�Ե،��Fƽ���������@һҊ�⣬��ʡ�����WԺ���о��ˆT�OӋ��һ�����ε�ģ�ͣ�ԓģ�Ϳ��Ԉ�����Ƶ�ƽ��̎����ʹ���܉�ע�ڙC�����c���w֮�g�ĺ��Ļ��ӣ����A�y�L���О顣�������о��������@�N���������ɏ��sӋ�������c�����W��һ����Ч�� "Pang �f��"��������}�и�����˽⣬�����OӋ������Ч���㷨�� ����Ό��㷨�M�����½M���ǂ����} �M��ƽ��̎������˛Q�ߣ�������ʣ���Q����Ȼ��һ���y�}����ˣ��о��ˆT��������ģ���cһ�N�㷨��Y�ϣ��@�N�㷨���Կ���GЧ�������C���˿������������ЛQ���� ͨ�^�@�N�M�ϣ��ژ˜ʹPӛ����X�ϵ�Ӌ��r�g�s�̵��sһ��犡� ��������ģ�M����Мyԇ���Լ��ķ�������ģ�M����У��C���˵��ֱ��x�����Ƅ�䓹P���������á��_�T������P�ӵ��΄ա���ÿ�N��r�£���������ģ�͵ķ�����ȡ�����c�����W����ͬ�����ܣ�������r�gֻ�Џ����W����һС���֡����������挍�Cе���ό�ģ���M��Ӳ���yԇ�r��Ҳ��������ƵĽY���� ���Fȫ���ٿv������ͬ���m�����`�ɵ�����Ҏ�����ص������f��"��ǰ��������о��ˆT���J�鏊���W�����m�����`���p�ֵķ�����ͨ�^�ď����W������ȡ���S�C��ƽ���@һ�P�I˼�룬���������������y��Ҏ������Ҳ�dz���Ч��" Ȼ���������_�l��ģ����ه�ڌ��挍����ĺ��ν��ƣ���˟o��̎���dz��ӑB���\�ӣ��������w���䡣�����ķ����mȻ���ٶ��^���IJٿv�΄���Ч�����o������һ�����C���ˌ����������M����Ͱ��Ӌ����δ�����о��ˆTӋ�����M�����ļ��g��ʹ���܉�̎���@ЩG�ӑB�\�ӡ�
|
| �������D�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C���������������݃H�������������֙࣬Ոϵ�h������ |
| ���]��Ϣ |
|
����SA�Cе���������m���y�����w�IJ�����ܛ��
����SA�Cе�������Ķ��ӽY���܉�z�yƤ�w��̖,�������|�����͂ȑ�׃;�H�H������Ȳ����Գ�����������ܛ�Ⱥͳߴ�����(����)�����w׃��������ؕ�I
ܛ�w�Cе�ֵ��|�X���м��g�о�-ᘌ���ͬ�����|�X����������Ҫ���܌��ȷ���
�㷨����Ч�Բ���;Ƿȱ�ɿ��Ŀ��Ʋ���;����ܛץ�ֵď��s�|�X��֪ϵ�y�ijɱ�;��3D��ӡ�Ļ��A�ϰlչ���ԏĶ��������M���{�����������켼�g
ChatGPT������Ƹ�ˆT
�ṩһЩ�P��λ��ȱ����Ϣ������ �Ĺ������ƶ����Һϸ���Ո�˵IJ��ԡ��@���ܰ���ͨ�^�罻ý�w�� �罻�������������Ƹ�����|���ں��x��
ChatGPT����W�j��ȫ����
�ṩһЩ�P����δ惦���픵 ���ľ��w��Ϣ������Ĺ�������������o�@Щ�������ܐ����О��� �����IJ��ԡ��@���ܰ������h���ܷ�����������������ʩ��ijЩ ��Ә�ӛ����ɵIJ���
ChatGPT����UX/UI�_�l�ˆT
�ṩ���P���ó��Wվ�� �������֮aƷ�OӋ��һЩ����������Ĺ���������������Եķ��� ���������Ñ��w�
ChatGPT����AI��������
�ṩһ����Ҫ�������M�� �����ČW���������΄���ʹ���˹����ܹ�����W���ṩ���P��θ��M�����ĵķ���,�����h�W�����Ը��õ��ԕ�����ʽ ���_�������뷨���뷨�ķ���
ChatGPT���Δ��W�ώ�
�ṩһЩ���W����ʽ������ �Ĺ�����������������g�Z������������@���ܰ����ṩ��Q���} �ķֲ��f������ҕ�X��ʾ���N���g���h�ھ��YԴ�Թ��Mһ���о�
ChatGPT�䮔�܌W�ώ�
�ṩһЩ�c�܌W�о����P��Ԓ�}����� ����������ͨ�����ķ�ʽ����@Щ����@���ܰ����ṩʾ���� ������}���s���뷨�ֽ�ɸ���������ĸ�С�IJ��� |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-�˜ʰ� |
| AGV�o���\ݔ�C����-����棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI�ӑB |
