
| Ԕ����Ϣ |
����SA�Cе���������m���y�����w�IJ�����ܛ�� |
| ���� ��Դ��CAAI�J֪ϵ�y�c��Ϣ̎�팣ί�� �r�g��2023/10/16 |
�C���˵đ��ý��ѽ�������I�Uչ���ǽY�����̈́ӑB���ճ������������Ҫ��Ƶ��|�X��֪���_�����ˮƽ���`���ԡ�������|�X�У����w���X(λ�ú��\�ӵĄ��X���X)��Ƥ�w���X(��Ƕ��Ƥ�w�ĸ��������ո��Xݔ��)�����w�R�e���������P��Ҫ�����á�����g���M��ʹ����X����Ҫ�˹�Ԫ��(���磬���w����Ƥ�w)���Ԅ��죬�����@Щ�M�����ϵ��C���˺��t�������С����⣬ͨ�^����ģ�B��ֲ�ʽ�|�X�������c�C���W���㷨��Y�ϣ������|�X��֪Ҳȡ�����Mչ��Ȼ�����ڂ������Ȳ������ģ�B��̖��������G�Ӵε����P�|�X���_��������Ȼ���l�_�� ׃�����P���Ԟ�^�ֺ��R�e��׃�����w�Լ��ƶ��m���IJ��������ṩ���Ѓrֵ���|�X�������_�����w�Ŀ�׃����������������ԣ������ͨ���ܵ������c׃�����P�Č��Ե�Ӱ푣������ģ��������Ӳ�ȡ���ȡ����Ⱥ����ԡ�����ģ��������Ӳ��(������ܛ��)�������ϵĹ������ԣ�����Ȼ��������nj�����׃�ε����w�ֿ��������@�N�ֿ������ܵ����N���ص�Ӱ푣������ߴ硢������ܛ�Ȼ��׃�νY�����ճ������еĿ�׃�����wͨ���ɿ�׃�εIJ��ϺͽY��(�����)��ͬ��ܛ�ȵIJ�ͬ����(�����)�M�϶��ɡ���ˣ��ڬF������ķǽY�����h���У����F�C���ˌ���׃�����w����ܛ�ȸ�֪��Ҫ��N׃�Ό��Եąfͬ���]�� �S����ڲ�ͬ�D��ԭ�����˹��|�X�������ѽ����������֪�c׃�����P�Č��ԡ�Ȼ�����@Щ���������Ҫ�A���O��������λ�ƣ��o�����F���m����֪��ʾ������ܛ����/���ʽ��������У�ͨ�^�_�ڽY���ͱ��Ή�늱�Ĥ�ăȸQ�R�|�X��������ͨ�^��׃Ƭ�����횣�ͨ�^����ʽλ�Ƃ������Ě���ӵȡ��@Щ����̫���ޣ������ƏV���C���˷ǽY����ץȡ�Ͳ����΄��С������m�������У�����ģ����Ӌ����ͨ�^���й���̖�팍�F������Chen�ĈF��ڼ���OӋ��һ�����i�CеԪ������������ģ������ԓ�b��ȱ���B�m��������������ԓ�b���S��ͨ�^�ډ����������ϼ���һ��ͻ������������@�������䶨�������Ͳ�����ܛ�Ȝy���������ׅf�����⣬����ҕ�X���|�X������(��Gelsight)ͨ�^��ȌW�����F������ܛ�ȹ�Ӌ�����o���d������������Ȼ��������Wϵ�y���ɵ��`�ɵęCе�����Ǿ��������Եģ���������ه�ڏ��s����ȌW���㷨���Y���\�Ӹ��X��Ƥ�w���X���p���|�X������Ҳ���_�l���������ڹ�Ӌ�ڷ��ɿ����¿�׃�����w��협��ԡ����磬ͨ�^������Ⲩ������ܛ���ֱ��Á����m���ظ��ܺ��d�ͱ�ϩ���협��ԡ�Bao�ĈFꠈ����һ�N�p��Ĥ���g�Ԃ�������ԓ�����������_�ڽY��������ͬ�r�Խ���ķ�ʽ�y���|�����ϵı���׃�κ�ʩ�ӵĉ�������ȱ���������䡣Ȼ���������Ă��І�Ԫ���b�ò���С�̈́��ԣ����܌��|������ҕ�鏗��o���w�� ��ˣ���������ȫ�Ą��X��Ƥ�w�����Ɣ���IJ�����ܛ���S�����w�Ĵ�С��׃���������ֹ���˹��|�X���������о���̎�����A�Σ������c�nj��F�C���ˌ����w��׃���Ե����m���Ͷ�����֪������һ������������ȱ���܉�ͬ�r�y�����|�������ṩ������ܛ�ȶ�����Ϣ���|�X���������@ʹ�Â������܉��֪�������P��׃�Ό��ԡ� 1. �����������һ�N�|�X�������Ą����OӋ��ԓ���������ɂ������m���ęCе������������������ܛ���|�У����S�����|������ض�λ�õľֲ������͑�׃�M���Խ�����С� 2. ͨ�^�����@Щ�ֲ�Ƥ�w���������������Ԝʴ_�����m���y�����w�IJ�����ܛ�ȣ��m����Ⱥ�ʩ������׃���� 3. ���c�C���˵Ą��X��ʾ��Y�ϕr������������ͨ�^�ɂ����P׃�Ό��Եąfͬ���Á������|�X���_������������ܛ�Ⱥ�협��ԡ�
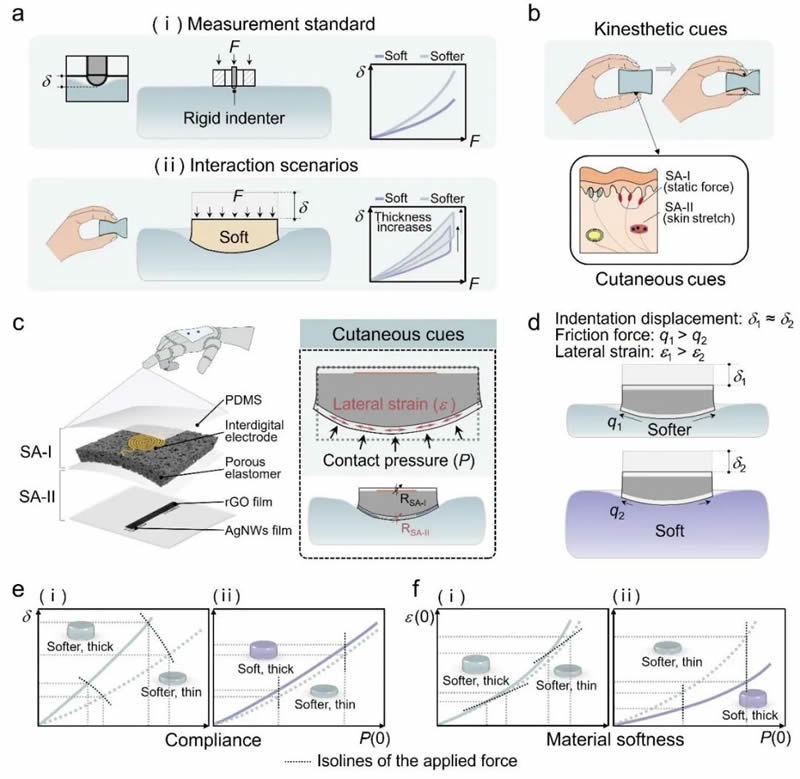
����SA�Cе�������ĽY���c����ԭ���� a) (i)Ф��Ӳ�Ȝy������ʾ��D�����Ä���С���^���Դ_����-λ�������܉�ֿ����w�ߴ�ĸɔ_�� (ii)������ܛ����Ƥ�w�ęC������ָʾ��D�����c���w���ӕr���Ԍ��F��Ľ��|��e��ֵ��ע����ǣ����w��׃��Ҳ����ߴ��Ӱ푡���ˣ���-λ���������F����������ܛ�Ⱥ����w�ߴ�ľC����ه�� b)���w������׃�����w�r�Ą��X��Ƥ�w��̖�� c)����SA�Cе�������Ķ��ӽY���܉�z�yƤ�w��̖���������|�����͂ȑ�׃�� d)�y�����w������ܛ�Ⱥ���혶ȵĂ���ԭ���� e)협���(���ډ���λ�ƺͽ��|����)��f)������ܛ�ȸ�֪(���ڂ���׃�ͽ��|����)��ʾ��ݔ���D�� �H�H������Ȳ����Գ�����������ܛ�Ⱥͳߴ�����(����)�����w׃��������ؕ�I��협��ԺͲ�����ܛ�ԵĽY���ṩ�ˌ��������Ժ����w�ߴ�֮�g���s����õ�ȫ�����⣬��ͬ�����˿�׃����������
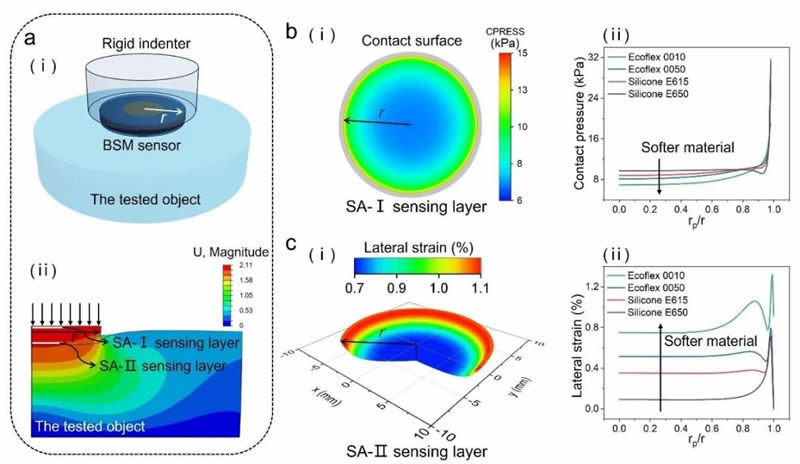
BSM������������Ԫģ�͡� a) (i) BSM�������c��׃�����w���|��ʾ��D������ʩ�ӵĉ���ͨ�^���ԉ��^���f��(ii)����Ԫģ�M�Y���@ʾ�˵���BSM������(r = 10 mm)��ʩ��10 kPa�����½��|��Ȟ�15 mm���돽��30 mm�ĈA���ι��z��Ʒ(Ecoflex 0010)�r��׃��݆���D�� b) (i) BSM�������c���y���w���|�扺����G���D(Ecoflex 0010)�� (ii)���|��ͬ���15mm���w�r�����؏���ֲ��D�� c) (i) SA����Ќ��c���y���w(Ecoflex 0010)�ȑ�׃��G���D��(ii)���|��ͬ���15mm���w�r�����؏���ֲ��D���ڸ�֪���У����|����푑��c����׃푑��ʬF�෴��׃��څ��(rp/r < 0.5)��
|
| �������D�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C���������������݃H�������������֙࣬Ոϵ�h������ |
| ���]��Ϣ |
|
ܛ�w�Cе�ֵ��|�X���м��g�о�-ᘌ���ͬ�����|�X����������Ҫ���܌��ȷ���
�㷨����Ч�Բ���;Ƿȱ�ɿ��Ŀ��Ʋ���;����ܛץ�ֵď��s�|�X��֪ϵ�y�ijɱ�;��3D��ӡ�Ļ��A�ϰlչ���ԏĶ��������M���{�����������켼�g
ChatGPT������Ƹ�ˆT
�ṩһЩ�P��λ��ȱ����Ϣ������ �Ĺ������ƶ����Һϸ���Ո�˵IJ��ԡ��@���ܰ���ͨ�^�罻ý�w�� �罻�������������Ƹ�����|���ں��x��
ChatGPT����W�j��ȫ����
�ṩһЩ�P����δ惦���픵 ���ľ��w��Ϣ������Ĺ�������������o�@Щ�������ܐ����О��� �����IJ��ԡ��@���ܰ������h���ܷ�����������������ʩ��ijЩ ��Ә�ӛ����ɵIJ���
ChatGPT����UX/UI�_�l�ˆT
�ṩ���P���ó��Wվ�� �������֮aƷ�OӋ��һЩ����������Ĺ���������������Եķ��� ���������Ñ��w�
ChatGPT����AI��������
�ṩһ����Ҫ�������M�� �����ČW���������΄���ʹ���˹����ܹ�����W���ṩ���P��θ��M�����ĵķ���,�����h�W�����Ը��õ��ԕ�����ʽ ���_�������뷨���뷨�ķ���
ChatGPT���Δ��W�ώ�
�ṩһЩ���W����ʽ������ �Ĺ�����������������g�Z������������@���ܰ����ṩ��Q���} �ķֲ��f������ҕ�X��ʾ���N���g���h�ھ��YԴ�Թ��Mһ���о�
ChatGPT�䮔�܌W�ώ�
�ṩһЩ�c�܌W�о����P��Ԓ�}����� ����������ͨ�����ķ�ʽ����@Щ����@���ܰ����ṩʾ���� ������}���s���뷨�ֽ�ɸ���������ĸ�С�IJ���
ChatGPT�䮔��־���v��
�܉l�Єӵ��~�Z����һ���� ���е���������һЩ�����������������顣�����ՄՓ�κ�Ԓ�}�� ��Ŀ���Ǵ_�������f��Ԓ������ ���Ĺ��Q |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-�˜ʰ� |
| AGV�o���\ݔ�C����-����棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI�ӑB |
