
| Ԕ����Ϣ |
ӭ�e�C���������P�����`���� |
| ���� ��Դ��CAAI�J֪ϵ�y�c��Ϣ̎�팣ί�� �r�g��2023/6/16 |
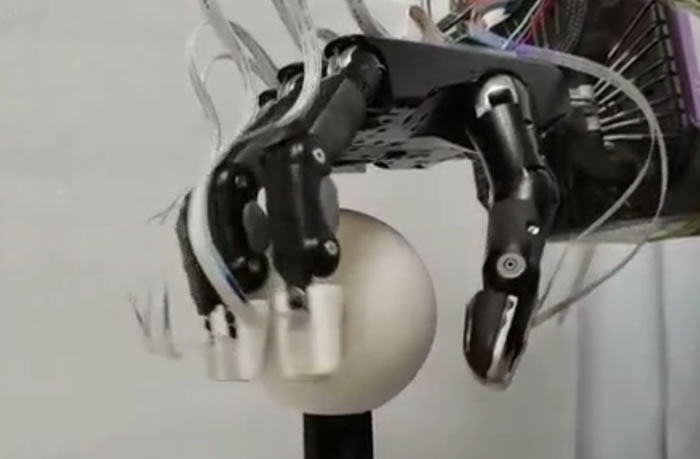
�C���������P�����`������ָ�������Ժͱ���������ԣ�ʹ��ԓ�P�����`���֣���ָ�����r�܉����m�����j�����w���档 ��ָ����ͨ�^�B�Ӄɹ����K����׃������λ�û�ʹ�����K�͏�λ���ɵĽM�ρ팍�F��ָ�P�����D���S������`����ʹ�����@��P������Hannes Hand��KIT Hand��IR2-hand��X-Hand��Soft Hand���@�N�M�˻����`���ֱ��Q�������`���֣�ͨ����Ƿ�ӵģ����p�@���P���S�ϵ������K���P���S�ϻ�݆�������D������ָDһ���P������K�\�ӕr�������P���܉����m�������������ָ���j���^�̡� ���У�IR2 Hand��X- Hand�����е������ӡ�����ʹ�Ãɂ����Լ���ɾ����ϣ�ͨ�^��׃�ɂ�����ɾ�������λ�ã����F��ָ�ď����͏�λ���@Щ�`���ֵ�ȱ�c������ָ������������Ҫ������^̎�ĽY�����s����Ҫ���b�~����b���Դ_������֧�Ρ�
|
| �������D�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C���������������݃H�������������֙࣬Ոϵ�h������ |
| ���]��Ϣ |
|
ӭ�e�C���˄����P�����`����
�C���˄����P�����`����ͨ�^�B�U�C���c늙C�B�ӻ���늙Cֱ�����P���\��,���оo��,��ץ�����߿��ƾ��ȵȃ���
AutoML���g·��
1 �����A̎�������������Ԅӻ�;2 �����������Ԅӻ�;3 ģ���x���Ԅӻ�;4 ģ���^���Ԅӻ�,������ģ�ͽM������������A�y���ܵ��^��
MLOps���g·��
1 ��������c�_�l;2 ����������ˮ��;3 ģ��ԇ���ˮ��;4 DevOps;5 ���mӖ����ˮ��;6 ���m������ˮ��;7 ���m�O����ˮ��
����������MLOps�cģ��AutoML�����ĵIJ�ͬ
MLOps����������Ӗ�����u��MLģ�͵Ĕ���.�������|���͔������P�I;AutoML���ȿ��]��������㷨���W�j�ܘ�����Q���^�Ć��}
ƽ�_���ڔ����ӵ�AI��Ҫ��
�����ڹ��픵����AI��Q�����ĿɔUչ��;����Ҋ���ͬ̎�픵����ģ�͵Ĺ��ߺ���;������ۙ���,����ģ�Ͱ汾���_���Y���Ŀ��؏���
�Ԕ��������ĵ�AI���Ã����@��
�����ӵ�AI������߷�������;�U�������Ӗ���Ĕ������{ģ������;�����ӵ�AI�f��ģ�͵ֿ������Թ���;�Ą��w�ƌW��
��ģ�͞����ĵ�AI����ʹ�c���YԴ���ɱ�Ҫ��ߵ�
ģ���ӵ�AIͨ���漰���д��������ď��sģ��;ģ���ӵ�AI�Џ��sģ�͵�Ӗ����Ҫ�r�g�L;���sģ��ͨ���^�y��ጺ�����
2016-2022���˹����ܮa�I���P��������
�P��Ҏ���ͼӏ��˹�����˾�����õ���Ҋ,�P�ڼӿ�����������˹����ܸ�ˮƽ���ô��M�������|���lչ��ָ����Ҋ,�P��֧�ֽ��O��һ���˹�����ʾ�����È�����֪ͨ |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-�˜ʰ� |
| AGV�o���\ݔ�C����-����棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI�ӑB |
