
| Ԕ��(x��)��Ϣ |
�T�Ԍ�(d��o)�������ΙC(j��)�����I(l��ng)��đ�(y��ng)�� |
| ���� ��(l��i)Դ�������Cȯ �r(sh��)�g��2023/7/24 |
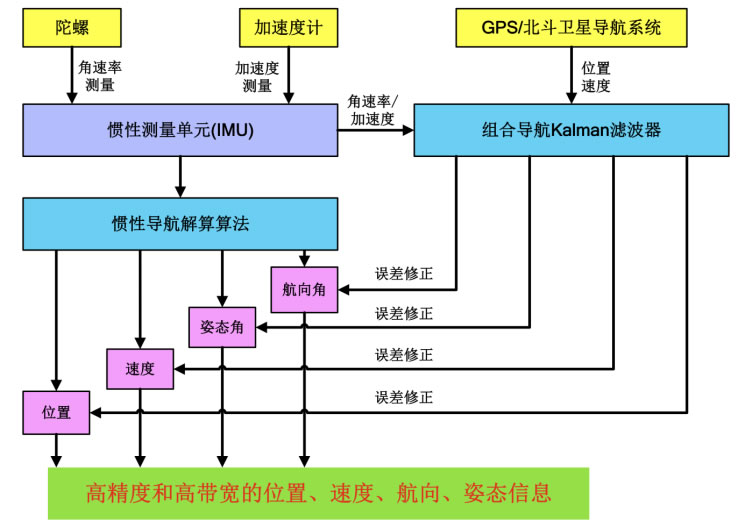
�T�Ԍ�(d��o)���ǑT�Լ��g(sh��)��Ҫ��(y��ng)��֮һ���T�Ԍ�(d��o)��ϵ�y(t��ng)��Inertial Navigation System - INS���������݃x�ͼ��ٶ�Ӌ(j��)�������������ں��l(w��i)�nj�(d��o)�����l(w��i)�nj�(d��o)���� ���Č�(d��o)�����o(w��)��늌�(d��o)����������(d��o)�����g(sh��)���γɵČ�(d��o)������(sh��)����ϵ�y(t��ng)�� Ŀǰ ADAS ϵ�y(t��ng)һ���\(y��n)���ٶ�Ӌ(j��)�����݃x�������������ʹ����x�ȑT�Ԃ��� �������ٶ�Ӌ(j��)�Á�(l��i)�y(c��)���\(y��n)��(d��ng)���w�ļ��ٶȴ�С�ͷ��@ȡλ����Ϣ�����݃x�� �Ɍ�(d��o)������(bi��o)ϵ��ʹ���ٶ�Ӌ(j��)�y(c��)��ֵͶӰ��ԓ����(bi��o)ϵ�У���ݔ��������ˑB(t��i)�ǣ��� ���x�Á�(l��i)�y(c��)���y(c��)���ň�(ch��ng)��(qi��ng)�Ⱥͷ���λ����ͨ�^(gu��)�ش������õ��`��������� �ɷ��������݃x���ˑB(t��i)�����У�����У��(zh��n)���݃x��Ư�ơ� GNSS+IMU �����dz��õđT�Ԍ�(d��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����������γɻ��a(b��)�� GNSS ���l(w��i)����̖(h��o)�^���Ĉ�(ch��ng)����(hu��)��(d��o)�¶�λ��Ϣ���t����ɲ����A(y��)֪��ʧ�؈�(ch��ng)���� �T�Ԍ�(d��o)��ϵ�y(t��ng)��(sh��)��(j��)������G����(d��o)����Ϣ���t�ͣ�����ϵ�y(t��ng)��(w��n)�������ܵ����ɔ_�� ���Բ�����������Ϣ���o(w��)��J�˭h(hu��n)��������̖(h��o)Ӱ푣��܉��Q���m(x��)�Ԇ�(w��n)�}�����L(zh��ng) �ڕr(sh��)�g�\(y��n)����(hu��)��(d��o)��ϵ�y(t��ng)��Ӌ(j��)�`�����ӣ������Ҫ GNSS ��Q��(zh��n)�_�Ԇ�(w��n)�}����(du��)λ�� ��Ϣ�M(j��n)��У��(zh��n)�����㷨ʾ��D���£�
G���ȑT�Ԃ����� L2.5 �����Ԅ�(d��ng)�{�裬���������ںϷ����������M(j��n)�С� Ŀǰ��������һ��λ���g(sh��)�o(w��)���M���Ԅ�(d��ng)�{���܇����Ҫ��G���ȡ��ĬF(xi��n)�г���܇������܇���C(j��)�Sʹ�õķ�����������ʹ�ö��������ں϶�λ���g(sh��)�����˲��ýM�� ��(d��o)����G���ȵ؈D��߀��(hu��)�x��ҕ�X(ju��) SLAM �������_(d��)�ȼ��g(sh��)��
|
| �������D(zhu��n)�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c(di��n)���C��(sh��)������������(n��i)�݃H�������������֙�(qu��n)��Ո(q��ng)(li��n)ϵ�h������ |
| ���]��Ϣ |
|
�C(j��)����ҕ�X(ju��)��ͬ������(y��u)ȱ�c(di��n)��(du��)��
ToFҕ�X(ju��)������(du��)����̖(h��o)�ķ�(w��n)����Ҫ������(du��)����;�pĿҕ�X(ju��)���������x���Ȟ����(j��),2m ��(n��i)�`����ǧ��֮��;�Y(ji��)��(g��u)��ҕ�X(ju��)����������������(du��)�^�ߵķֱ���
���ܙC(j��)����ҕ�X(ju��)��Q����-3D������
�Y(ji��)��(g��u)�ⷨ,ͨ�^(gu��)ͶӰ�ض��Ĺ�ģʽ�����w��, ��ͨ�^(gu��)�z�y(c��)������׃��(l��i)�@ȡ���w�����S�Π�;ToF����ͨ�^(gu��)�y(c��)���⾀�İl(f��)�䵽�����(l��i)�ĕr(sh��)�g��(l��i)��Ӌ(j��)���w�ľ��x
�C(j��)����������ǝL���z�����a(ch��n)��I(y��)
�h���C(j��)����ɝL��ֱ����(d��o)܉����15�(xi��ng)�z�ܮa(ch��n)�I(y��)�®a(ch��n)Ʒ�_�l(f��);���ǿƼ��������ǝL���z�ܵ��аl(f��)�c���a(ch��n)��������̱�ʽ�_(d��)��
�������ܙC(j��)���˂������c��(zh��)������Ͳ��
�ֲ��Y(ji��)��(g��u)���ú����w��ͬ����ָ���P(gu��n)��(ji��)�O(sh��)Ӌ(j��),��(zh��)�������ݗU���D(zhu��n)����(d��ng)�X݆���D(zhu��n)�M(j��n)��ʹ��ָ�P(gu��n)��(ji��)���D(zhu��n)�ĽY(ji��)��(g��u),ʹ���^�齛(j��ng)�����늙C(j��)�(q��)��(d��ng)��ʽ,Ĵָ�����p늙C(j��)�(q��)��(d��ng)�����͂�(c��)�[
���ΙC(j��)���˝����Ј�(ch��ng)Ҏ(gu��)ģǧ�|��(j��)�e������Ѹ��
ȫ�����ΙC(j��)�����Ј�(ch��ng)��Ӌ(j��)��5.6�|��Ԫ,����2027���A(y��)Ӌ(j��)�Ј�(ch��ng) Ҏ(gu��)ģ���_(d��)��141�|��Ԫ,CAGR�_(d��)58.5%,2027���Ї�(gu��)���ΙC(j��)�����Ј�(ch��ng)�����_(d��)��23�|��Ԫ,CAGR�_(d��)56.4%
��(gu��)�a(ch��n)���ΙC(j��)����-�����~ExoMotus
�����~�����ڿ���(f��)�C(j��)�����I(l��ng)��Įa(ch��n)Ʒ����ѽ�(j��ng)��������,�����аl(f��)��ArmMotus™ EMU���S��֫����(f��)�C(j��)���ˡ�ExoMotus ™��֫����(f��)�C(j��)����
��(gu��)�a(ch��n)���ΙC(j��)����-��(y��u)���x WalkerX
Walker X����130cm,�w��63kg,����41��(g��)�������ŷ��(q��)��(d��ng)�P(gu��n)��(ji��),��ߕr(sh��)�ٞ�3km/h ,�沿160��h(hu��n)�@4.6K�����p����������,����ݿɲ�ж늳�
��(gu��)�a(ch��n)���ΙC(j��)����-С��CyberOne
���η����C(j��)����CyberOne,��1.77��,��52kg,��(n��i)�����Q�F��,���Mi-Sense���ҕ�X(ju��)ģ�K,����AI��߂��֪3D���g���R(sh��)�e��(g��)�w,�ք�(sh��)�ͱ��������;�{�������аl(f��)��MiAI�h(hu��n)���Z(y��)�x�R(sh��)�e�����MiAI�Z(y��)������R(sh��)�e���� |
| �����\(y��n)ݔ�C(j��)���� |
| AGV�o(w��)���\(y��n)ݔ�C(j��)����-����� |
| AGV�o(w��)���\(y��n)ݔ�C(j��)����-��(bi��o)��(zh��n)�� |
| AGV�o(w��)���\(y��n)ݔ�C(j��)����-����棨�k����|(zh��)�� |
| AGV�o(w��)���\(y��n)ݔ�C(j��)����-؛�ܰ棨�k����|(zh��)�� |
| AGV�o(w��)���\(y��n)ݔ�C(j��)����-؛�ܰ棨���治�P䓲��|(zh��)�� |
| AGV�o(w��)���\(y��n)ݔ�C(j��)����-�_�Ű� |
| �ИI(y��)��(d��ng)�B(t��i) |
