
| Ԕ����Ϣ |
�T�Ԃ������д���ϵ�y�`����S�C�`�� |
| ���� ��Դ�������Cȯ �r�g��2023/7/24 |
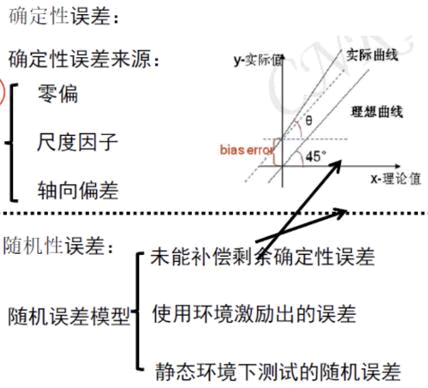
ϵ�y�`�����^ϵ�y�`����ָ���S�C�`�ϵ�y���`��|�������ҵ�Ҏ�ɵ��`��� �Կ��Ԍ��r�a����������ͨ�^��������У�����������݃x�ͼ��ٶ�Ӌ��ϵ�y�`�� һ �� �� �� �� �� �� �N �� �_ �C �� �� �� �� �� ƫ �` �� �� bias ���� �� �� �� �� �` �� ��scalefactor�������غϼ��������`�misalignmentandnon-orthogonality���� �Ǿ����`�non-linearity�����ض��`�thermalnoise�����������݃x߀������ �ٶȵ�׃��������`�g-dependentnoise�����T�Ԃ������е�ƫ���ǜy��ֵ�c ���������Hݔ��ֵ֮�g�ĺ㶨ƫ�ơ�������������һ�N�`���ʾ�T�Ԃ������� ݔ�����c����������ݔ����֮�g�IJ�ƥ�䡣ͨ����r�£��T�Ԃ���������ݔ ��ֵ����ͬ�ڂ�������ݔ��ֵ����ˣ��A�ڵ�ݔ��ݔ���ȑ����� 1��Ȼ�������� ���ӌ����F��T�Ԃ�������ݔ��ݔ���Pϵƫ�x���� 1��ϵ�y�`�����һ�N��ʽ�DZ������ӷǾ����`�ͨ����r�£���������ݔ��ݔ���Pϵ�Ǿ����Pϵ��Ȼ���� ���ڭh��Ӱ푺�ijЩ���������OӋ���T�Ԃ�������ݔ��ݔ���Pϵ���ܲ��Ǿ����P ϵ�� �S�C�`���T�Ԃ������У��S�C�`��һ��ָ�����o���ҵ����m���Pϵ����ȥ�������� ���Ժ��y̎������Ҫ�����S�C�����`�����ƫ���������`������S�C�����`�� ����������������G˹��������ƫ���������`����F�����������ƫ���S�r �g��u׃����
|
| �������D�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C���������������݃H�������������֙࣬Ոϵ�h������ |
| ���]��Ϣ |
|
�������ܙC���˽���IMU���F��λ��ƽ�⼰�ˑB�z�y
�T�Ԃ������ɼ��Ľ��ٶ��c���ٶȵȑT����Ϣ���������������ΙC���˵Č��rλ���c�\��܉�E,�c�C���˴��d�Ķ��������ں�,�ڔ�����ͺ͔����l���g���F���a
�T�Ԍ��������ΙC�����I��đ���
GNSS ���l����̖�^���Ĉ��������¶�λ��Ϣ���t����ɲ����A֪��ʧ�؈���;�T�Ԍ���ϵ�y���������ʸ�,������Ϣ���t��,�����ܵ����ɔ_
�C����ҕ�X��ͬ������ȱ�c����
ToFҕ�X����������̖�ķ�����Ҫ����������;�pĿҕ�X���������x���Ȟ����,2m ���`����ǧ��֮��;�Y����ҕ�X�����������������^�ߵķֱ���
���ܙC����ҕ�X��Q����-3D������
�Y���ⷨ,ͨ�^ͶӰ�ض��Ĺ�ģʽ�����w��, ��ͨ�^�z�y������׃���@ȡ���w�����S�Π�;ToF����ͨ�^�y���⾀�İl�䵽������ĕr�g����Ӌ���w�ľ��x
�C����������ǝL���z�����a��I
�h���C����ɝL��ֱ����܉����15헽z�ܮa�I�®aƷ�_�l;���ǿƼ��������ǝL���z�ܵ��аl�c���a��������̱�ʽ�_��
�������ܙC���˂������c��������Ͳ��
�ֲ��Y�����ú����w��ͬ����ָ���P���OӋ,���������ݗU���D�����X݆���D�M��ʹ��ָ�P�����D�ĽY��,ʹ���^�齛�����늙C�ӷ�ʽ,Ĵָ�����p늙C�ӏ����͂Ȕ[
���ΙC���˝����Ј�Ҏģǧ�|���e������Ѹ��
ȫ�����ΙC�����Ј���Ӌ��5.6�|��Ԫ,����2027���AӋ�Ј� Ҏģ���_��141�|��Ԫ,CAGR�_58.5%,2027���Ї����ΙC�����Ј������_��23�|��Ԫ,CAGR�_56.4%
���a���ΙC����-�����~ExoMotus
�����~�����ڿ��͙C�����I��ĮaƷ����ѽ���������,�����аl��ArmMotus™ EMU���S��֫���͙C���ˡ�ExoMotus ™��֫���͙C���� |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-�˜ʰ� |
| AGV�o���\ݔ�C����-����棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI�ӑB |
