
| Ԕ����Ϣ |
��ʲôҪ�lչ���ΙC���� |
| ���� ��Դ���Ї�ƽ���Cȯ �r�g��2023/7/27 |
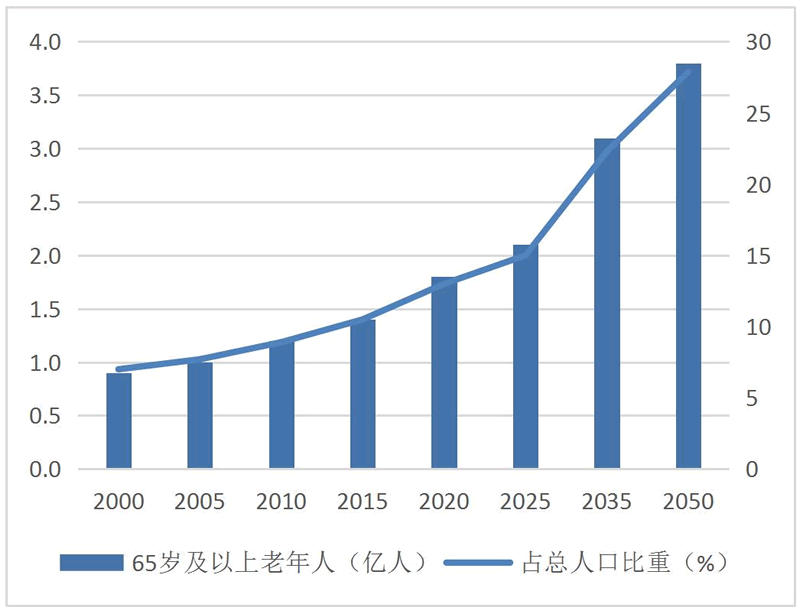
�ڄ����˿ڔ������m�»��������¡��յȶ�������ͬ��څ�ݡ������yӋ�ְl���Ĕ� ���@ʾ��2022 ���҇��˿ڏ����g���ɿ���16~59 �q�Ąڄ����g�˿� 8.76 �|�ˣ�ռȫ���˿ڵı� �؞� 62.0%��60 �q�������˿� 2.8 �|�ˣ�ռȫ���˿ڵ� 19.8%������ 65 �q�������˿� 2.1 �|�ˣ� ռȫ���˿ڵ� 14.9%���ڄ����g�˿��� 2011 ��ǰ���ѽ��_����ֵ 9.4 �|�ˣ�֮���_ʼؓ���L�� ʮ�����g���ڄ����g�˿ڜp�ٳ��^ 6000 �f�������y�аl���Ĕ����@ʾ�������Ąڄ����g�˿��� 2010 ���_ʼ�ͼ��ٜp�٣��ձ�������Ӣ�������ͬ�ӵ��˿ڽY��׃��څ�ݡ� 65 �q�����˿ڱ������m������ 2050 �� 65 �q�����˿ڱ������_ 16%���������� ���lչ��� 2020���˿����g���İlչڅ�ݺ����ߡ��A�y��2025 �ꡰʮ���塱Ҏ����ɕr�� 65 �q�����ϵ������ˌ����^ 2.1 �|��ռ���˿ڔ��ļs 15%��2035 ��� 2050 ��r�� 65 �q�����ϵ������ˌ��_�� 3.1 �|�ͽӽ� 3.8 �|��ռ���˿ڱ����t�քe�_�� 22.3%�� 27.9%�� �χ������@ʾ��2021 �� 65 �q�������˿ڞ� 7.61 �|���� 2050 ���@һ�������ӵ� 16 �|�� 80 �q�����ϵ��˿����L�ٶȸ��졣�����������˿�չ�� 2022���Ĕ����@ʾ��2022 �� 65 �q���� �˿�ռ���˿ڱ����� 10%���� 2050 �ꌢ���� 16%��
����I�ڄ��������½��������p�ڄ���ռ�ȿ����½��������yӋ�֔�����2015-2020 �꣬������Iƽ���ù��˔��� 8711 �f���»��� 6550 �f�ˣ��hG��ͬ�ڠI�I���� 3%ˮƽ�Ľ����� �����g�Y������2015 ������I�ڄ��� 30 �q����ռ�� 28.2%��30-45 �qռ�� 45.7%��45 �q���� ռ�� 26.2%������ 2019 �꣬����I�ڄ��� 30 �q����ռ�� 21.4%��30-45 �qռ�� 46.1%��45 �q ����ռ�� 32.4%������I�ڄ������g�ϻ��ٶ��^�졣 ��������I�˔��½��������ѽ����vʷ��ˮƽ������ؔ����W���H�����о����Ŀ��� �о��T�����ϡ�����ҕ��������I�ġ�˥�䡱������ 1939 ���ԁ���������I�͘I�˔����m���L�� �� 1978 ���_��D�壨1933 �f�ˣ���2022 ����������I�͘I�˔��� 1298 �f�ˣ�ռȫ���͘I�ı� �H�� 8%��̎�ښvʷ��ˮƽ�� �����ɱ����m�������C���������һ��څ�ݡ����������W���� 2022 ���������ȫ���� ȱ������ 100 ���I���п��������� 39 ���������a���켰���P�ˆT���� 19 �����ڌ��I���g�� �T����ȱ����λ������Ҫȱ���DŽڄ��ܼ����ИI�ͼ���һ���T���Ͳ����I���g�ˆT�����ڄڄ� ���g�˿��½����ڄ������oڅ�o���˹��ɱ������ı����£��ÙC�������ˮ���ϵĺ����؏̈́� ����һ��څ�ݡ��������W�͘I�о������L����Ȫ�f������ Reshoring Institute ��棬 13 ������I���ӆT��н�Y�У��¡�����Ӣ�˾���н���^ 3 �f��Ԫ�������������� �����ǵͳɱ� �Ǵ�ęC�����Ј���21 ��C�������ل���G���������H�C�����ϕ���IFR�� �l���ġ�2022 ��C���ˈ�桷��2021 �깤�S�°��b 51.7 �f�_�C���ˣ�ͬ�����L 31%�� ���vʷ��G���\���еęC���˴����s�� 350 �f�_�����������µļo䛡�����Dһ�� ���I�C�����Ј��� 2021 �갲�b�����L 51%���°��b 26.82 �f�_���\�д���ͻ�� 100 �f�_�� �P�����L 27%��
|
| �������D�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C���������������݃H�������������֙࣬Ոϵ�h������ |
| ���]��Ϣ |
|
�C���p������RV�p�������^
�C���p�����w�eС,�|��С,�ڶ��P���C����С��,��,�ֲ��Ȳ��������^������;RV�p����ؓ�d�����̈́��ȸ�,��ƣ�����ܺ�,�����ڙC���˙C������,�ϱ�,�±۵�
�C��������p�������P��I
��Ĭ�{�Ə����C���p����,�C�һ�w���aƷ;�ձ������¾��ܜp�ٙC,׃�ٙC���_�l;�G���C�����F�˾����C���p������Ҏģ�����a���N��
�C���˵��ⲿ����������Щ
ӭ�e���ՙC�����ⲿ�������Á�z�y�C������̎�h��,����ʹ�C���˸��ʴ_�ث@ȡ�܇��h����r,�c���F�ض��������P�Ă������������w�R�e������,�ַł�������
�C���˵ăȲ�����������Щ
�C���˲��������Á�z�y�C���˱�����B�����ֱ��g�Ƕȣ��Ă�����,�����ϵ�y�ṩ������Ϣ,����λ�Ƃ��������ٶ�/���ٶȂ�����,���ٶȂ�����
���ՙC���ˑ��È����߶ȼ��֣�ͨ�û����ӯ����Ҫͻ�Ʒ���
������Ӳ���˜ʻ�+ܛ��ͨ�û������F�����������ϣ��㲿���˜ʻ������ƹ��ܵęC����ʹ����ͬ�㲿�������һ�㲿���a�������ͳɱ�
���MEMS IMU�����ЃɷN;��
�����²���,�¹�ˇ,�¼��g���·���;����ܛ���㷨����������͑T�Ԃ������ľ���,�`��ģ�Ϳ��Է֞��o�B�`��ģ��,�ӑB�`��ģ�ͺ��S�C�`��ģ��
MEMS IMU �`�����
MEMS�T�Ԃ�������ƫ�����`����Ҫ������ƫ,��ƫ�������c�؏��Ԍ��µ��`��;�̶����`�ֱ�ӎ���y����ϵ�yƫ��
�T�Ԃ������д���ϵ�y�`����S�C�`��
���^ϵ�y�`����ָ���S�C�`��,�DZ������ӷǾ����`��;�S�C�`��һ��ָ��,��Ҫ�����S�C�����`�����ƫ���������`�� |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-�˜ʰ� |
| AGV�o���\ݔ�C����-����棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI�ӑB |
