
| Ԕ����Ϣ |
�C���˵ăȲ�����������Щ |
| ���� ��Դ���Ї�ƽ���Cȯ �r�g��2023/7/27 |
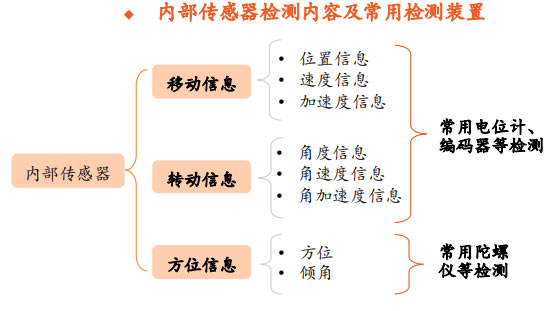
���ܙC���˂����������z�y����IJ�ͬ�ɷ֞�Ȳ����������ⲿ���������Ȳ����������ⲿ��������ͬ�M���˙C���˵ĸ�֪ ϵ�y�����ګ@ȡ�C���˃Ȳ����ⲿ�h������Ϣ�������@Щ��Ϣ�����o����ϵ�y�� �Ȳ����������Á�z�y�C���˱�����B�����ֱ��g�Ƕȣ��Ă������������ϵ�y�ṩ������Ϣ���C���˳��õăȲ� ����������λ�Ƃ��������ٶ�/���ٶȂ����������ٶȂ������Լ���S�������������w�о��a�������݃x�ȡ�
|
| �������D�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C���������������݃H�������������֙࣬Ոϵ�h������ |
| ���]��Ϣ |
|
���ՙC���ˑ��È����߶ȼ��֣�ͨ�û����ӯ����Ҫͻ�Ʒ���
������Ӳ���˜ʻ�+ܛ��ͨ�û������F�����������ϣ��㲿���˜ʻ������ƹ��ܵęC����ʹ����ͬ�㲿�������һ�㲿���a�������ͳɱ�
���MEMS IMU�����ЃɷN;��
�����²���,�¹�ˇ,�¼��g���·���;����ܛ���㷨����������͑T�Ԃ������ľ���,�`��ģ�Ϳ��Է֞��o�B�`��ģ��,�ӑB�`��ģ�ͺ��S�C�`��ģ��
MEMS IMU �`�����
MEMS�T�Ԃ�������ƫ�����`����Ҫ������ƫ,��ƫ�������c�؏��Ԍ��µ��`��;�̶����`�ֱ�ӎ���y����ϵ�yƫ��
�T�Ԃ������д���ϵ�y�`����S�C�`��
���^ϵ�y�`����ָ���S�C�`��,�DZ������ӷǾ����`��;�S�C�`��һ��ָ��,��Ҫ�����S�C�����`�����ƫ���������`��
�������ܙC���˽���IMU���F��λ��ƽ�⼰�ˑB�z�y
�T�Ԃ������ɼ��Ľ��ٶ��c���ٶȵȑT����Ϣ���������������ΙC���˵Č��rλ���c�\��܉�E,�c�C���˴��d�Ķ��������ں�,�ڔ�����ͺ͔����l���g���F���a
�T�Ԍ��������ΙC�����I��đ���
GNSS ���l����̖�^���Ĉ��������¶�λ��Ϣ���t����ɲ����A֪��ʧ�؈���;�T�Ԍ���ϵ�y���������ʸ�,������Ϣ���t��,�����ܵ����ɔ_
�C����ҕ�X��ͬ������ȱ�c����
ToFҕ�X����������̖�ķ�����Ҫ����������;�pĿҕ�X���������x���Ȟ����,2m ���`����ǧ��֮��;�Y����ҕ�X�����������������^�ߵķֱ���
���ܙC����ҕ�X��Q����-3D������
�Y���ⷨ,ͨ�^ͶӰ�ض��Ĺ�ģʽ�����w��, ��ͨ�^�z�y������׃���@ȡ���w�����S�Π�;ToF����ͨ�^�y���⾀�İl�䵽������ĕr�g����Ӌ���w�ľ��x |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-�˜ʰ� |
| AGV�o���\ݔ�C����-����棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI�ӑB |
