
| Ԕ��(x��)��Ϣ |
ʲô�Ǿ������ܣ� |
| ���� ��Դ���Ї�ƽ���Cȯ �r�g��2023/7/27 |
����(j��)�Cȯ�r������Ӣ���_��(chu��ng)ʼ���S�ʄ��� ITF World 2023 �댧(d��o)�w����ϱ�ʾ��AI ��һ�� �˳����ǡ��������ܡ����������ġ��������ܡ���ָ�܉����⡢�������c�������绥�ӵ�����ϵ�y(t��ng)�� �����C���˼��g(sh��)���Ԅ��{���܇������������C���ˣ�����������������������˽��������� ����(j��)�Ϻ�������ڱR�����ڙC��֮�� AI �Ƽ�����ϣ��l(f��)�������}���v �������������ܡ��� �������������ܿƌW(xu��)��һ�����A(ch��)���}����ָ�������w�w�����ܡ����J(r��n)֪�Ƕȿ��������Dһ�˷Q ҕ�ǵ����ܣ����o�C��ι�ܶ���(sh��)��(j��)�M�ЌW(xu��)��(x��)�����ڵ����˷Q�����ܣ�����o�C���ܶ���ӣ����Ҙ�(bi��o) ע�@���Ǻ��ӣ�Ȼ��C���͕�֪���@�Nģʽ�Ǻ��ӣ����C��������ͨ�^�w�֪���@�Ǻ��ӵġ� ����(j��)���������ܡ�������؈�Ǿ������ܣ����^؈�����^���ܡ�1963 ���һ�����?z��i)�һ���? ��չʾ���ߵą^(q��)�e��һֻ؈����������ֻ�ܿ��@�����磬�c���B�ӵ���һֻ؈�t��������ȥ�ߡ��� �ӵ�؈��һ�N���^�����ܣ������ӵ�؈�Ǿ��������ܣ����ĺ������w��؈�W(xu��)�����������ߣ� �����^��؈���]�ܫ@������������
���������漰���W(xu��)�ƣ���ϵ�y(t��ng)�Թ��̡��Ϻ���ͨ��W(xu��)�R��������ڙC��֮�� AI �Ƽ������ �l(f��)�����}���v���������ܡ��ᵽ 1950 ��D�`������Փ�ġ�Computing Machinery and Intelligence�� �д�����˾������ܵĸ����������ˎ�ʮ����ֱ��������ű��^���T��ԭ�������漰������ �ČW(xu��)�ƣ���(d��ng)�r�ܶ��W(xu��)�ƶ����Ǻܳ��졣Ӳ����ܛ��߀�и��N�|�X������Ҳ������졣�����˽��죬 �����W(xu��)�ƶ����Ծ۵�һ�������@ôһ������ϵ�y(t��ng)�����@�ӵ���r�£��҂����п����Ƅ��@������ �Mһ���l(f��)չ
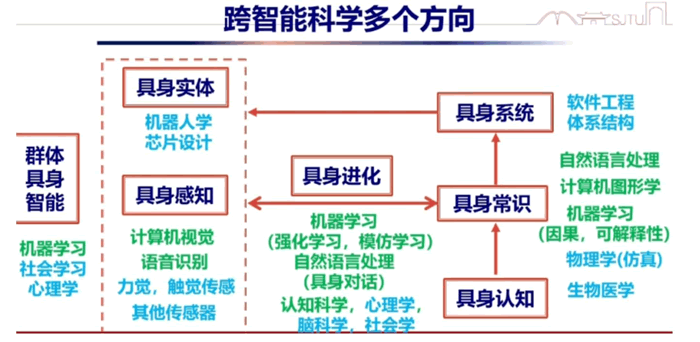
����(j��)���������ܡ����������ܰ��� 3 ��ģ�K��������֪����������;����(zh��)�У�AI+�C���� ���ǡ��������ܡ���(d��ng)ǰ�����c�����I(y��)�C������Ҫ����(j��)����ϵ�y(t��ng)�l(f��)����ָ����̖���ƙC�������w��� �΄�(w��)����Ҫ��ه�ڙC���˵Ĉ�(zh��)�Ќӡ��c���I(y��)�C���˲�ͬ���������ܙC������������һ���c�h(hu��n)�������� ��֪���Q�ߡ�����΄�(w��)�������ò�������֪�Ӻ��J(r��n)֪�ӵ��������R���������� PIE �������J(r��n)��� �����ܰ��� 3 ��ģ�K��������֪��Perception������������Imagination���;����(zh��)�У�Execution���� ���������ƄӾ���������ء�Ŀǰ������AI+�C���˻��S���ǡ��������ܡ���(d��ng)ǰ�����c
|
| �������D(zhu��n)�d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C��������������(n��i)�݃H�������������֙�(qu��n)��Ո(li��n)ϵ�h������ |
| ���]��Ϣ |
|
��ʲô�C����Ҫ�O(sh��)Ӌ�������
���������m�����������Ј������ΑB(t��i),�o���׃�������m��(y��ng)�C��;���εĺøж������h(yu��n)���ڷ�����;���ε�֫�w�Z�����������J(r��n)֪
��ʲôҪ�l(f��)չ���ΙC����
�Ї�����I(y��)�ڄ��������½�,�����p�ڄ���ռ�ȿ����½�,�����ɱ����m(x��)����,�C���������һ��څ��,�Ї���ȫ�����ęC�����Ј�
�C���p������RV�p�������^
�C���p�����w�eС,�|(zh��)��С,�ڶ��P(gu��n)��(ji��)�C����С��,��,�ֲ��Ȳ��������^����(y��u)��;RV�p����ؓ(f��)�d�����̈́��ȸ�,��ƣ�����ܺ�,�����ڙC���˙C������,�ϱ�,�±۵�
�C��������p�������P(gu��n)��I(y��)
��Ĭ�{�Ə����C���p����,�C�һ�w���a(ch��n)Ʒ;�ձ������¾��ܜp�ٙC,׃�ٙC���_�l(f��);�G���C�����F(xi��n)�˾����C���p������Ҏ(gu��)ģ�����a(ch��n)���N��
�C���˵��ⲿ����������Щ
ӭ�e����(w��)�C�����ⲿ�������Á�z�y�C������̎�h(hu��n)��,����ʹ�C���˸���(zh��n)�_�ث@ȡ�܇��h(hu��n)����r,�c���F(xi��n)�ض��������P(gu��n)�Ă������������w�R�e������,�ַł�������
�C���˵ă�(n��i)������������Щ
�C���˲��������Á�z�y�C���˱�����B(t��i)�����ֱ��g�Ƕȣ��Ă�����,�����ϵ�y(t��ng)�ṩ������Ϣ,����λ�Ƃ��������ٶ�/���ٶȂ�����,���ٶȂ�����
����(w��)�C���ˑ�(y��ng)�È����߶ȼ�(x��)�֣�ͨ�û����ӯ����Ҫͻ�Ʒ���
������Ӳ����(bi��o)��(zh��n)��+ܛ��ͨ�û������F(xi��n)�����������ϣ��㲿����(bi��o)��(zh��n)�������ƹ��ܵęC����ʹ����ͬ�㲿�������һ�㲿���a(ch��n)�������ͳɱ�
���MEMS IMU�����ЃɷN;��
�����²���,�¹�ˇ,�¼��g(sh��)���·���;����ܛ���㷨����������͑T�Ԃ������ľ���,�`��ģ�Ϳ��Է֞��o�B(t��i)�`��ģ��,�ӑB(t��i)�`��ģ�ͺ��S�C�`��ģ�� |
| �����\ݔ�C���� |
| AGV�o���\ݔ�C����-����� |
| AGV�o���\ݔ�C����-��(bi��o)��(zh��n)�� |
| AGV�o���\ݔ�C����-����棨�k����|(zh��)�� |
| AGV�o���\ݔ�C����-؛�ܰ棨�k����|(zh��)�� |
| AGV�o���\ݔ�C����-؛�ܰ棨���治�P䓲��|(zh��)�� |
| AGV�o���\ݔ�C����-�_�Ű� |
| �ИI(y��)�ӑB(t��i) |
